Abstract¶
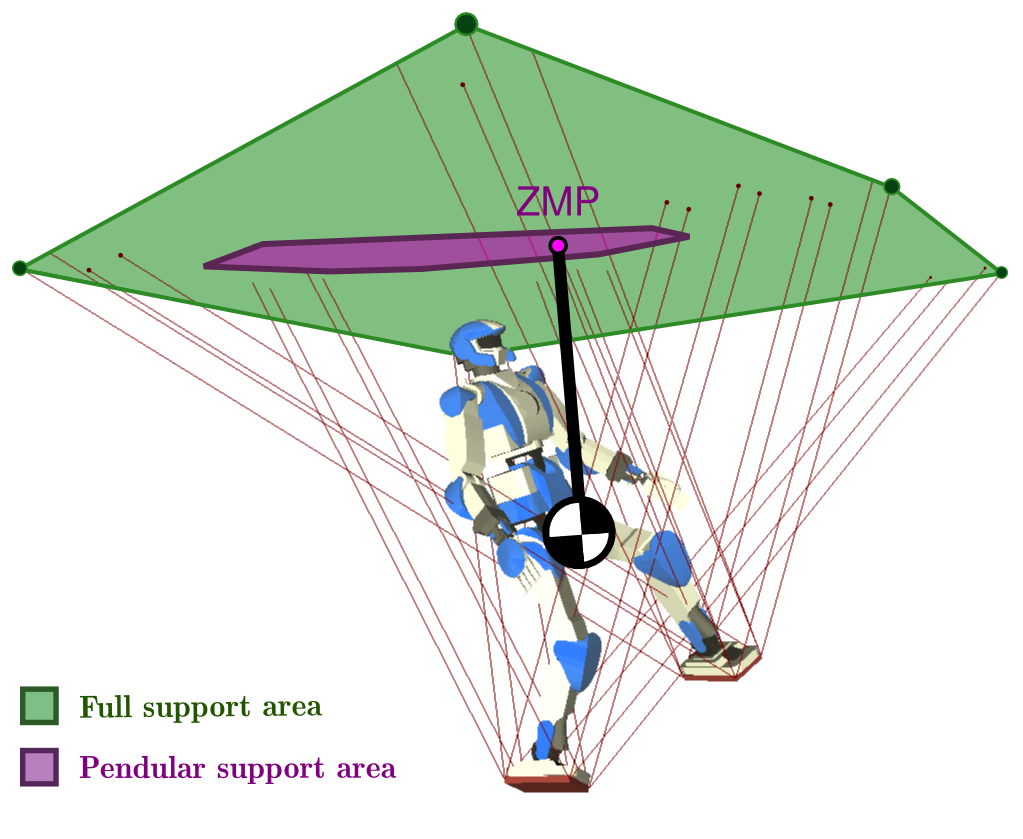
The Zero-tilting Moment Point (ZMP) and its support area are the two notions thanks to which roboticitsts solved the problem of walking on horizontal floor. Its historic definition presents two major limitations: all contacts between the robot and the environment need to be coplanar, and frictional effects (such as sliding or yaw rotations) are not taken into account. We present here a generalization of the ZMP "support area" that overcomes these two limitations. We show how to apply it with a linear-pendulum control law to generate stable multi-contact locomoting motions for humanoids in general environments.
Résumé¶
Le Zero-tilting Moment Point (ZMP) et son polygone de support sont les deux notions qui permirent aux roboticiens de résoudre le problème de la marche sur sol horizontal. Leur définition historique présente malheureusement deux limitations de taille : tous les contacts entre robot et environnement devaient être coplanaires, tandis que les glissements ou rotations de lacet n'étaient pas pris en compte. Nous présentons ici une généralisation de la "zone de support" du ZMP qui s'affranchit totalement de ces deux limites. Nous montrons ensuite comment l'appliquer avec une loi de contrôle de type pendule linéaire pour générer des trajectoires locomotrices humanoides dans un environnement où les contacts sont disposés arbitrairement dans l'espace.
Content¶
| Slides (opens in new window/tab for online reading) | |
| Slides (dirty PDF version for local copy) | |
| Paper |
Discussion ¶
Feel free to post a comment by e-mail using the form below. Your e-mail address will not be disclosed.