Abstract¶
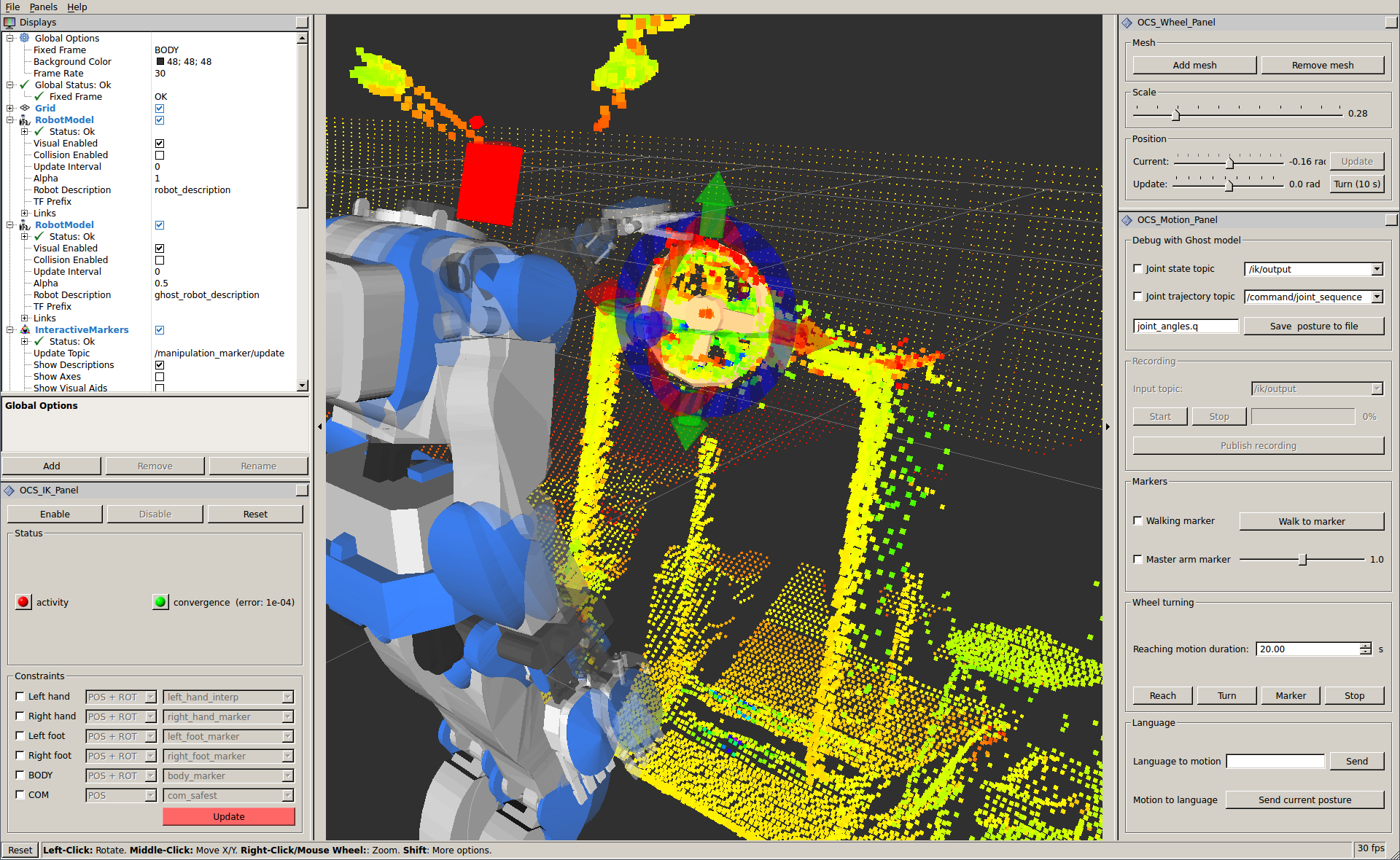
During the DARPA Robotics Challenge (DRC), robots were expected to solve a number of tasks under teleoperation by a human operator. Limits in execution time and teleoperation bandwidth required teams to implement some level of autonomy on their robots, yet meaningful input could still be provided by the operator on a regular basis via the team’s Operator Control System (OCS). The purpose of the present paper is to report on the development of Team Hydra’s OCS for the DRC in the context of the valve-turning task. We describe the design of the system as well as the technical choices made, meanwhile pointing out the underlying research questions and directions for future work.
BibTeX¶
@inproceedings{caron2015rsj,
title = {Teleoperation System Design of Valve Turning Motions in Degraded Communication Conditions},
author = {Caron, St{\'e}phane and Nakamura, Yoshihiko},
booktitle = {Proceedings of the 33rd Annual Conference of the Robotics Society of Japan},
year = {2015},
month = sep,
organization = {RSJ},
}
Discussion ¶
Feel free to post a comment by e-mail using the form below. Your e-mail address will not be disclosed.