Abstract¶
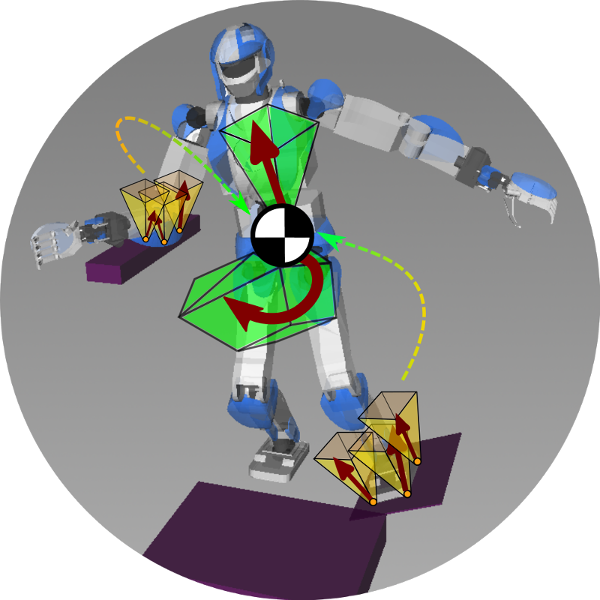
We build on previous works advocating the use of the Gravito-Inertial Wrench Cone (GIWC) as a general contact stability criterion (a "ZMP for non-coplanar contacts"). We show how to compute this wrench cone from the friction cones of contact forces by using an intermediate representation, the surface contact wrench cone, which is the minimal representation of contact stability for each surface contact. The observation that the GIWC needs to be computed only once per stance leads to particularly efficient algorithms, as we illustrate in two important problems for humanoids : "testing robust static equilibrium" and "time-optimal path parameterization". We show, through theoretical analysis and in physical simulations, that our method is more general and/or outperforms existing ones.
BibTeX¶
@inproceedings{caron2015rss,
title = {Leveraging Cone Double Description for Multi-contact Stability of Humanoids with Applications to Statics and Dynamics},
author = {Caron, St{\'e}phane and Pham, Quang-Cuong and Nakamura, Yoshihiko},
booktitle = {Robotics: Science and System},
year = {2015},
month = jul,
doi = {10.15607/RSS.2015.XI.028},
}
Discussion ¶
You can subscribe to this Discussion's atom feed to stay tuned.
-

Attendee #1
Posted on
In your previous work, you provided an analytical formula for the contact wrench cone. Why don't you use it in this paper?
-

Stéphane
Posted on
Unfortunately the analytical formula of the contact wrench cone is only known (yet) for a single contact. In multi-contact, the best call so far is to use numerical algorithms such as the double description method.
-
-

Attendee #2
Posted on
According to Figure 2, you use the double-description method to compute the span matrix at each contact. Is this necessary?
-
Stéphane
Posted on
It is not, as we later found out: local span matrices are straightforward to compute, as detailed for instance in the introduction of this paper. The only point where the double description remains necessary so far is for computing the gravito-inertial face matrix
-
-

Attendee #3
Posted on
What is the link between the matrix in this paper and the matrices or used in your follow-up 3D-COM pattern generator?
-
Stéphane
Posted on
In this paper, the gravito-inertial wrench coordinates are taken at the origin of the world frame. Using proper notations, we should have written to acknowledge this reference point. (We apologize for the non-standard notations.) Our later works uses the net contact wrench, i.e. the sum of all contact wrenches applied to the robot, which yields the opposite of the gravito-inertial one: Therefore, the face matrices are opposed as well:
-
-

Attendee #4
Posted on
Given an matrix , is it the case that its dual (face or H-representation) matrix has shape ?
-
Stéphane
Posted on
It is not always the case, as you can see in Table I of the paper. In single support, redundant inequalities simplify and the span matrix of the wrench cone has a face dual. However, in double-support the dual of the span matrix typically has more than 100 rows.
-
-

Attendee #5
Posted on
The cdd library gives me the error "Numerical inconsistency is found. Use the GMP exact arithmetic." What can I do?
-
Stéphane
Posted on
It may happen that your problem is "doable" but you ended up hitting some near-singular configuration. In such cases, a simple hack is to perturb the input (contact locations, or coordinates where the CWC is taken) by some epsilon.
Another cause of numerical instabilities are vectors that are "almost" rational, for instance with coordinates such as 0.4 + 1e-12. Rounding up coordinates to a sound number of decimals can filter out those.
If none of the above apply, you can try with rational rather than floating point numbers. In that case, I'd advise using PPL or its Python wrapper pyparma rather than cdd.
-
Attendee #5
Posted on
What about calling the
Canonicalize()function in cdd to remove redundant rays from the input V-description?-
Stéphane
Posted on
In my experience this extra step only make matters worse (with regards to numerical-inconsistency errors), so I would advise against doing it. Also, note that, even if your input V-description is irreducible, cdd may output you a non-minimal H-description.
-
-

Attendee #7
Posted on
Numerical instabilities seem to happen more often in stances with more contacts. Why?
-
Stéphane
Posted on
Unfortunately I have only an intuition here: making more contacts implies a resultant polyhedron with more faces, i.e. with more rays in the V-description and more hyperplanes in the H-one. This increases the risk of "tricky" faces (of very small area) in the output polyhedron, especially if some of your input rays are nearly aligned. My guess is that these make the double-description fail when it tries to cut (c.f. Fukuda's paper on the algorithm) by an "almost meaningless" hyperplane.
-
-
-
-

Attendee #8
Posted on
One footnote of the paper mentions Dirac fields. Are you referring here to the Dirac delta function and its higher dimensional versions?
-
Stéphane
Posted on
Yes, in this case we refer to the Dirac delta function, that is to say, a distribution that concentrates forces at the vertices of the contact area. You will find a bit more discussion on this point, along with a proof of the corresponding proposition, at the end of Section III of this study of surface contacts.
-
Feel free to post a comment by e-mail using the form below. Your e-mail address will not be disclosed.