Abstract¶
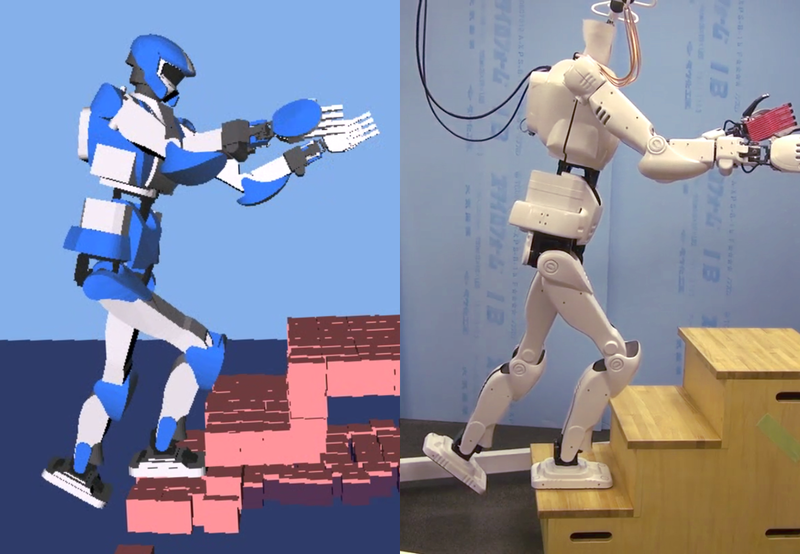
Stair climbing is still a challenging task for humanoid robots, especially in unknown environments. In this paper, we address this problem from perception to execution. Our first contribution is a real-time plane segment estimation method using unorganized lidar data without prior models of the staircase. We then integrate this solution with humanoid motion planning. Our second contribution is a stair climbing motion generator where estimated plane segments are used to compute footholds and stability polygons. We evaluate our method on various staircases. We also demonstrate the feasibility of the generated trajectories in a real-life experiment with the humanoid robot HRP-4.
BibTeX¶
@article{zhang2017ijhr,
title = {Supervoxel Plane Segmentation and Multi-Contact Motion Generation for Humanoid Stair Climbing},
author = {Zhang, Tianwei and Caron, St{\'e}phane and Nakamura, Yoshihiko},
journal = {International Journal of Humanoid Robotics},
year = {2017},
month = mar,
volume = {14},
issue = {1},
publisher = {World Scientific},
doi = {10.1142/S0219843616500225},
}
Discussion ¶
Feel free to post a comment by e-mail using the form below. Your e-mail address will not be disclosed.