Also, the moment is not always zero at the "zero" moment point 😉
Zero-tilting moment axis
Until the 2010's, many works had followed each other into the tunnel of considering that the "zero" moment point (ZMP) was a point on the ground. A liberating step came when Sardain and Bessonnet (2004) pointed out that, according to screw theory, the ZMP is actually an axis. They further observed that the moment at the ZMP is not necessarily zero on all three coordinates. Rather, the moment at the ZMP is zero along the two dimensions orthogonal to a tilting axis, which prompted Sardain and Bessonnet to suggest a renaming to zero-tilting moment point, conveniently still abbreviated "ZMP".
This correction was not needed for robots walking in the linear inverted pendulum mode on horizontal floors. It became significant when, spurred by the DARPA Robotics Challenge, the robotics community moved to walking over more general terrains: what if the "ground" is not well-defined at all? Luckily, since the ZMP is an axis rather than a point, we don't need to take it on the ground at all! This is how, for instance, Englsberger et al. (2015) replaced the ZMP by an equivalent free-floating "eCMP", or how Caron et al. (2016) computed ZMP support areas for general terrains.
Centroidal moment pivot
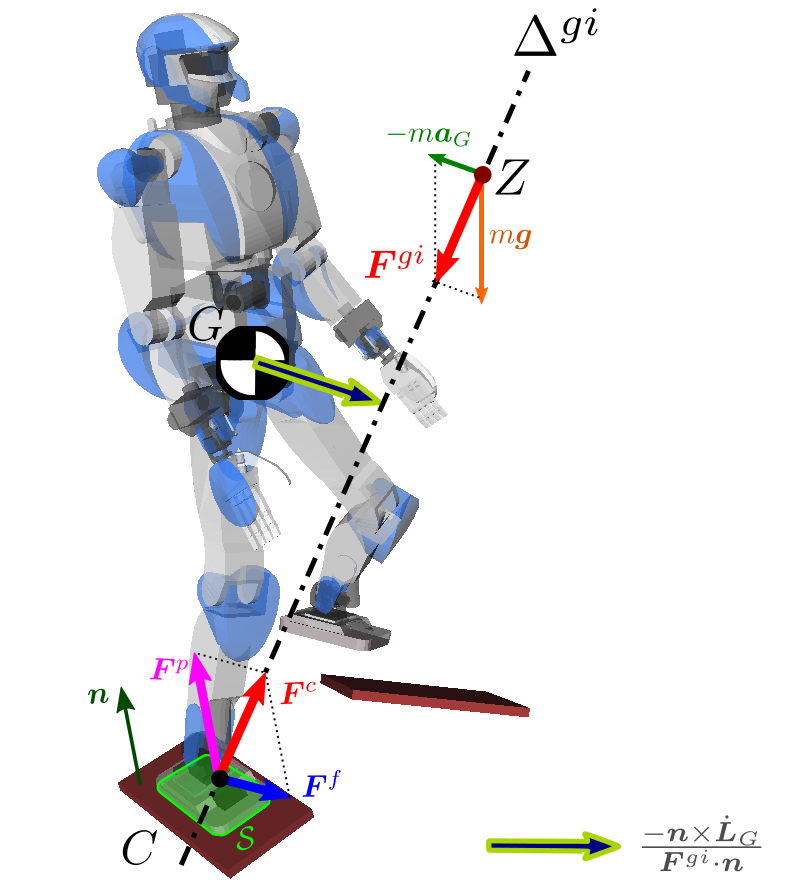
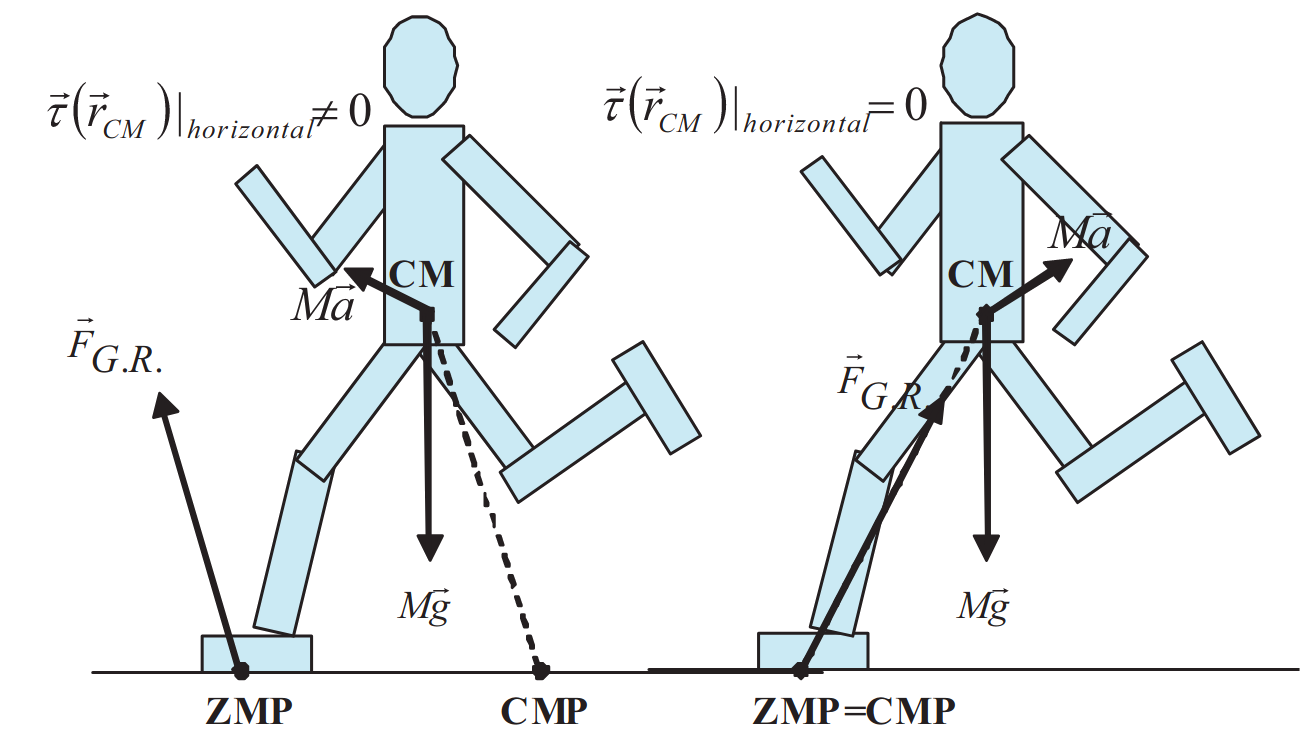
Angular momentum variations L˙G=0 at the center of mass cause the moment of contact forces to be non-zero at the ZMP (to be precise: on any ZMP of the zero-tilting-moment axis). Pivotal to understanding this was the work of Popovic et al. (2005) that introduced the Centroidal Moment Pivot (CMP), obtained by following the central axis of the net wrench of contact forces rather than the non-central ZMP axis. The two axes coincide when L˙G=0, and the difference between the two can be calculated as:
pCMP−pZMP=Fgi⋅n−n×L˙G
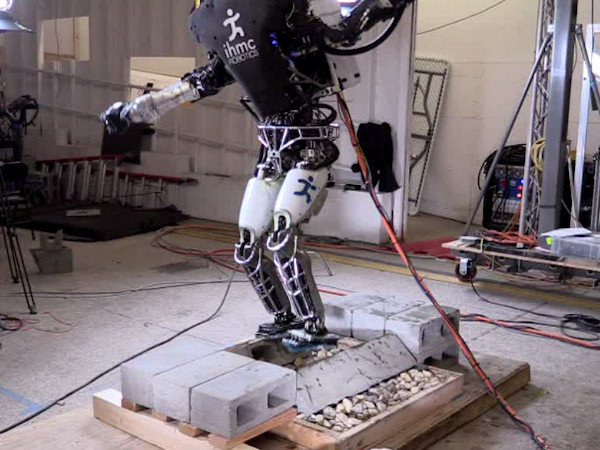
The ZMP is constrained to lie in a support area constrained by contact locations, but the CMP can (temporarily) exit this area thanks to angular momentum: this means "windmilling" the robot's arms to keep balance! Wiedebach et al. (2016) implemented this approach to make an Atlas humanoid walk over the edge of cinder blocks: the ZMP being constrained to a line when the robot is in single support, using its upper body is the only way for the big humanoid to keep advancing during this perilous phase.
The CMP was initially defined as a point on the ground, but similarly to the ZMP it is essentially defined as a screw axis. It was thus generalized as the extended CMP or "eCMP" by removing the ground-plane assumption. Some works based on the eCMP further assume that L˙G=0, in which case eCMP and ZMP coincide and the choice of acronym was up to the authors.
To go further
The CMP and its extension the eCMP have marked a local frontier in the level of complexity roboticists have been willing to both model and implement. One interesting direction to include angular-momentum modeling in control has been proposed by Nenchev (2018) and followed in later works by the same group. If you know others feel free to share them in the Discussion below.
Discussion
Feel free to post a comment by e-mail using the form below. Your e-mail address will not be disclosed.