Time-Optimal Path Param.: a tool for Humanoid Motion Planning and Predictive Control



Stéphane Caron
LIRMM, CNRS-UM2
Talk at Humanoids 2016, W3
November 15, 2016
https://scaron.info/slides/humanoids-2016/





In this talk...



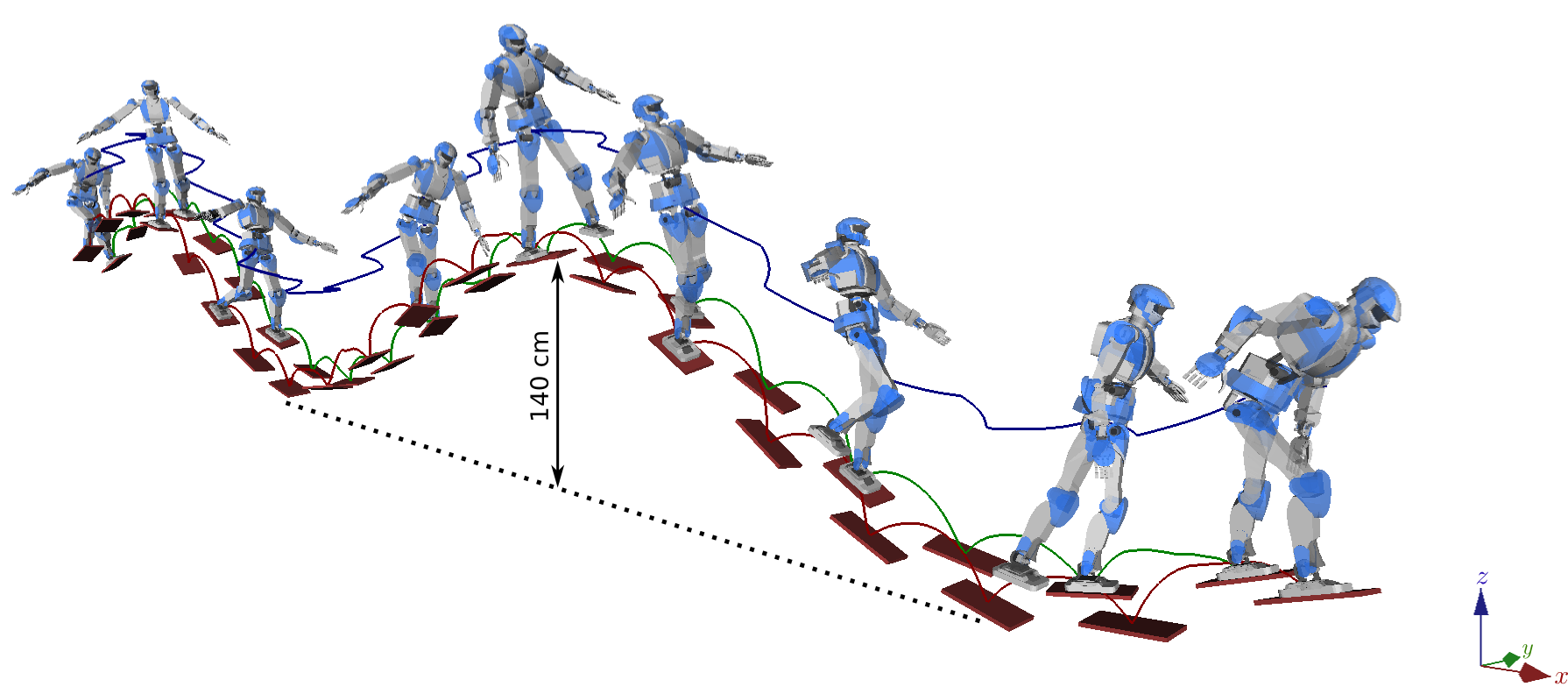
Time-Optimal Retiming
Kino-dynamic process
- Interpolate a path s↦q(s)
- Find a path retiming t↦s(t)
Path
Not retimed
Retimed
Disclaimer
It is not for time optimality that we use time-optimal retiming.


Manipulator
(for starters)
Full dynamics
Equations of motion for a fixed-base manipulator:
M(q)¨q+˙q⊤C(q)˙q+g(q)=τsubject to torque constraints |τ|≤τmax.
Path-tracking dynamics
The robot tracks the path s↦q(s) retimed as s(t):
˙q=qs˙s¨q=qs¨s+qss˙s2τ=m(s)¨s+c(s)˙s2+g(s)Torque constraints can then be written as a(s)¨s+b(s)˙s2+c(s)≤0.
Time-optimal solutions
TOPP applies to all systems for which path-tracking constraints can be written:
a(s)¨s+b(s)˙s2+c(s)≤0Pontryagin's maximum principle
At each s(t) of the retimed trajectory:
- either ¨s is maximal: ¨s=β(s,˙s)
- or ¨s is minimal: ¨s=α(s,˙s)
We know how to enumerate switch points where the optimal solution alternates between α and β [Pham, TRO 2014].
Phase Space

Waiter motion
Source: CRI group @ NTU.

Whole-body Optimization
Whole-body dynamics
The equations of motion for a humanoid are:
M(q)¨q+˙q⊤C(q)˙q+g(q)=S⊤τ+∑J⊤i(q)fiwith separate constraints:
- torque limits: |τ|≤τmax
- linearized friction cones: Aifi≤0
Question
How to write them as a(s)¨s+b(s)˙s2+c(s)≤0?
Tour de force
Solution found by [Hauser, IJRR 2014]:
- Eliminate torque variables: τ(s,˙s,¨s)=m(s)¨s+c(s)˙s2+g(s)−∑J⊤i(s)fi
- Constraints are now a polytope B[¨s ˙s2 F]⊤≤d, where F stacks contact forces.
- Project all force variables [Bretl and Lall, TRO 2008] to get a polygon: a¨s+b˙s2+c≤0

Figure adapted from [Hauser, IJRR 2014].
(¨s,˙s2)∈P ⇔ ∃F, (∀i, Aifi≤0) and B[¨s ˙s2 F]⊤≤d
Certificate of feasibility
Forces are not explicitely computed by the optimizer.
Yet, we have the guarantee that the controller can find feasible forces at run time.
Experiments
[Pham & Stasse, TMECH 2015] improved the algorithm for numerical TOPP.
Source: CRI group @ NTU.
Time to run TOPP on N=100 discretization steps: 5 ms
versus 2.5 s with non-linear optimization (SLP).
How can a “time optimal” motion
be so slow?
Answer: Robustness
All dynamic constraints are scaled:
- Torques: |τ| ≤ γττmax
- Friction: |fti| ≤ γfμfzi
- Area of surface contacts scaled by γs
where γτ,γf,γs∈(0,1), typically 50%.
Bottlenecks
Question 1
Most computation time (∼1 s) is now spent computing a(s),b(s),c(s).
Question 2
What to update in a joint-angle path q(s) when there is no solution?
Reduced-model Optim.
Contact Wrench Cone

Rationale
In multi-contact, frictional constraints are way more critical than torque limits.
Definition
Friction cone of resultant contact wrench.
Reduced model
Center of mass + Angular momentum.
Pipeline
We don't know how to interpolate the angular momentum, therefore:

Discussion
- Whent it fails: update the COM path.
- Can we avoid the IK step for the angular momentum?
(e.g. using the Linear Pendulum Mode where ˙LG=0)
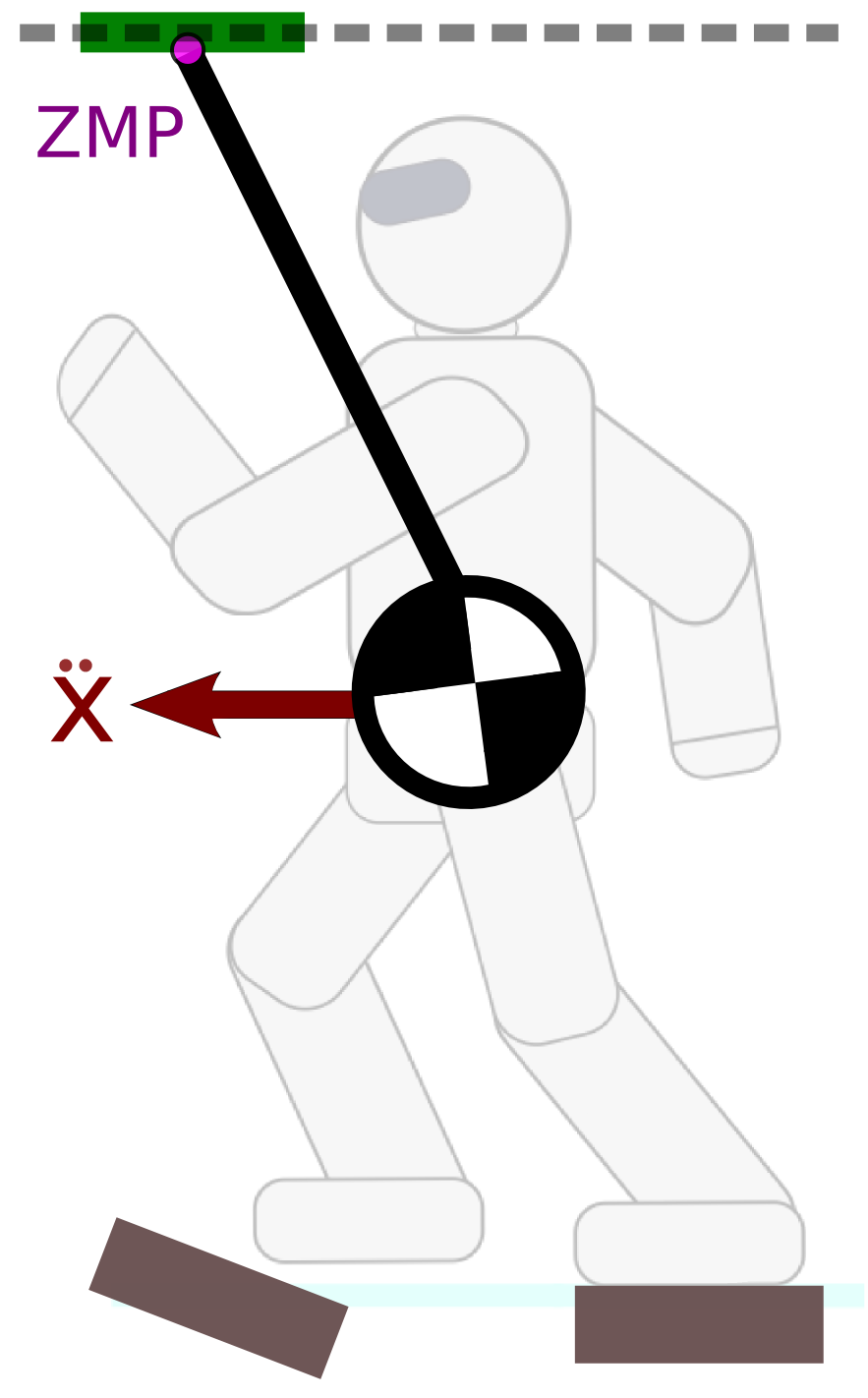
Reduced-model Support Polytopes
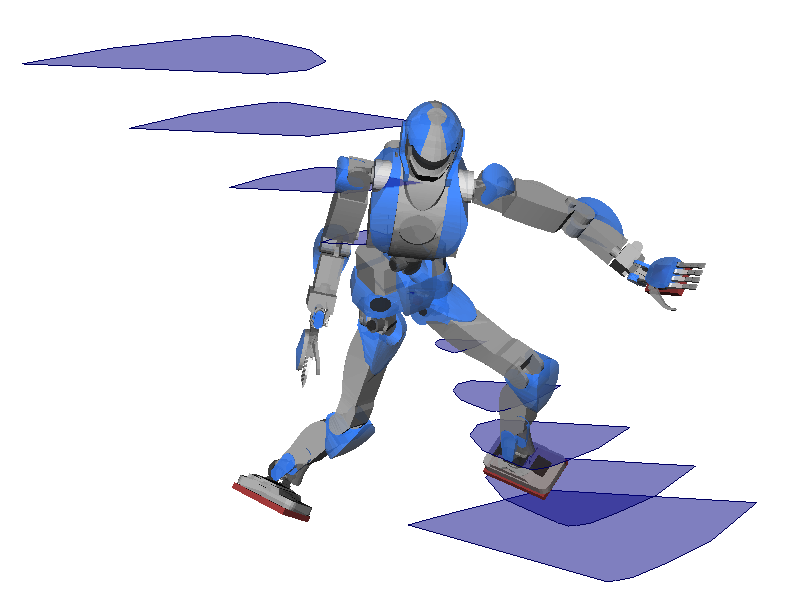
Multi-contact ZMP support areas
[Caron et al., TRO 2016]
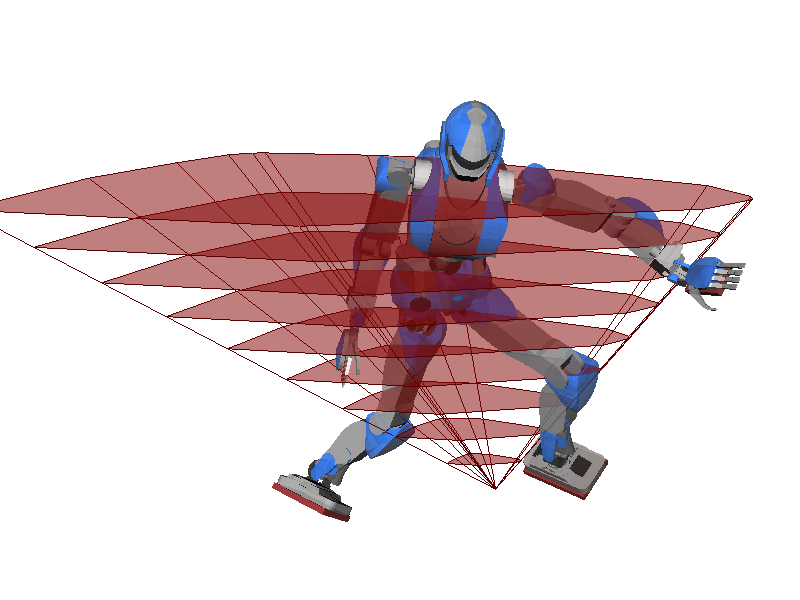
COM acceleration support volume
[Caron et al., Humanoids 2016]
Predictive Control
Step timings
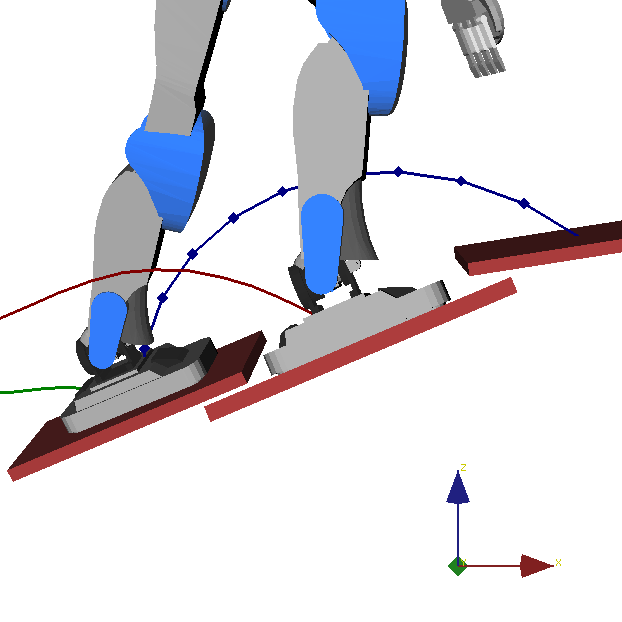
Fixed step timings do not work any more in multi-contact, where proper timings depend on terrain topology.
Multi-contact MPC on 3D COM

TOPP-MPC
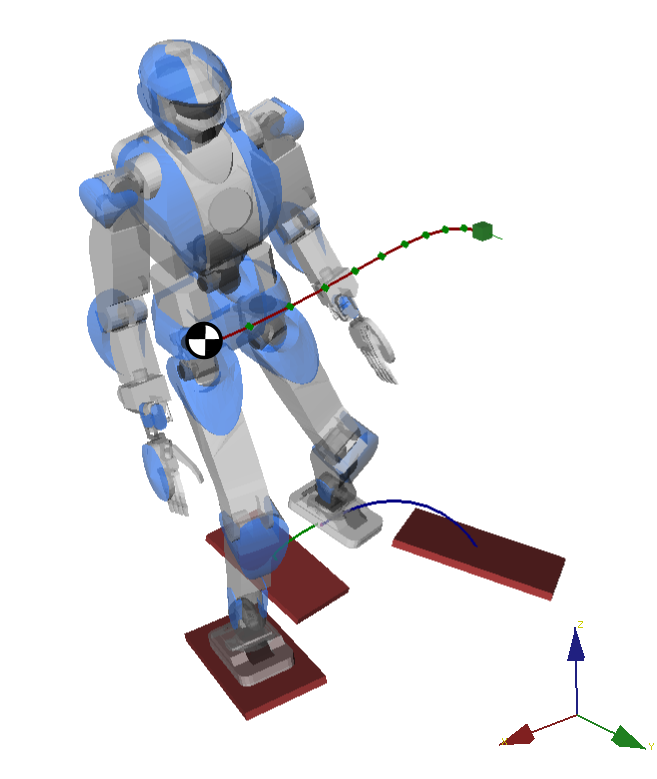
Ongoing work with Quang-Cuong Pham.
Idea
Use TOPP as dynamics filter in a predictive controller.
Main benefit
Step timings are computed automatically.
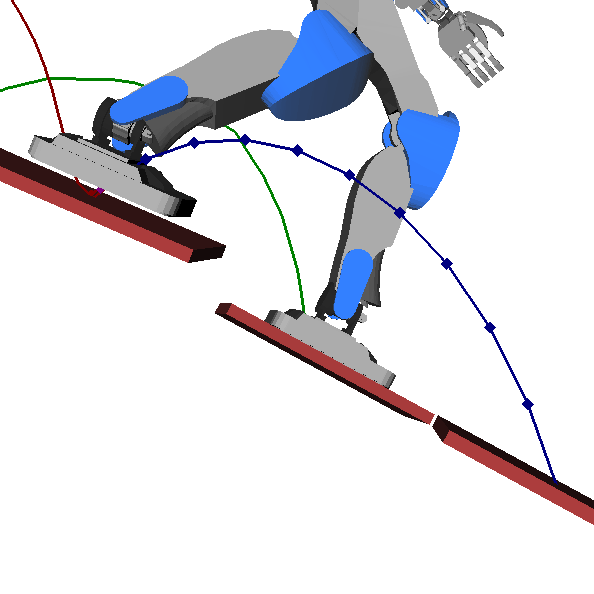
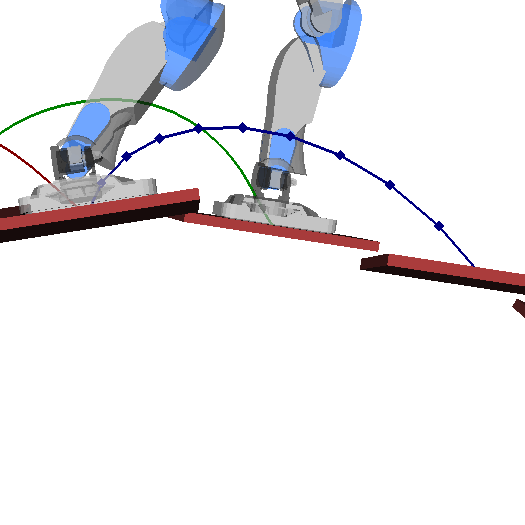
Contact switch in preview window
Parameterize foot trajectory, feed back step timing to COM optimization.
Pipeline

Continuous interpolation/retiming loop running at 20-30 Hz.
Concluding remarks
Time-optimal retiming
A fast dynamics filter.
Whole-body TOPP
Core idea of polytope projection: force/torques are not explicitly computed.
Reduced-model TOPP
Low-dimensional model for replanning and faster computations.
Predictive control
Nonlinear optimization running at 20-30 Hz in the control loop.
Thank you for your attention.