Welcome to the web page for the robotics class of the MVA master's program, taught by Justin Carpentier, Stéphane Caron, Silvère Bonnabel, Pierre-Brice Wieber and Ajay Sathya (TA).
A large part of the recent progress in robotics has sided with advances in machine learning, optimization and computer vision. The objective of this class is to introduce the general conceptual tools behind these advances and show how they have enabled robots to perceive the world and perform tasks ranging, beyond factory automation, to highly-dynamic saltos or mountain hikes. The course covers modeling and simulation of robotic systems, motion planning, inverse problems for motion control, optimal control, and reinforcement learning. It also includes practical exercises with state-of-the-art robotics libraries, and a broader reflection on our responsibilities when it comes to doing research and innovation in robotics.
robotics-mva25@inria.fr (subscribe)robotics-mva25-internships@inria.fr (subscribe)Lectures take place on Thursdays from 9:00 AM CET to 12:00 PM CET.
| Date | Where | Topic | Teacher | TA |
|---|---|---|---|---|
| 9/10/25 | TBC | Introduction to robotics | Justin Carpentier | - |
| 16/10/25 | TBC | Configuration space, rigid transforms | Silvère Bonnabel & Stéphane Caron | Ajay Sathya |
| 23/10/25 | TBC | Inverse kinematics | Justin Carpentier | Ajay Sathya |
| 30/10/25 | TBC | Motion planning | Stéphane Caron | Ajay Sathya |
| 6/11/25 | TBC | Perception and estimation | Silvère Bonnabel | - |
| 13/11/25 | TBC | Optimal control and simulation | Justin Carpentier | Ajay Sathya |
| 20/11/25 | TBC | Reinforcement learning for legged robots | Stéphane Caron | Ajay Sathya |
| 27/11/25 | TBC | Responsible robotics | Pierre-Brice Wieber | Ajay Sathya |
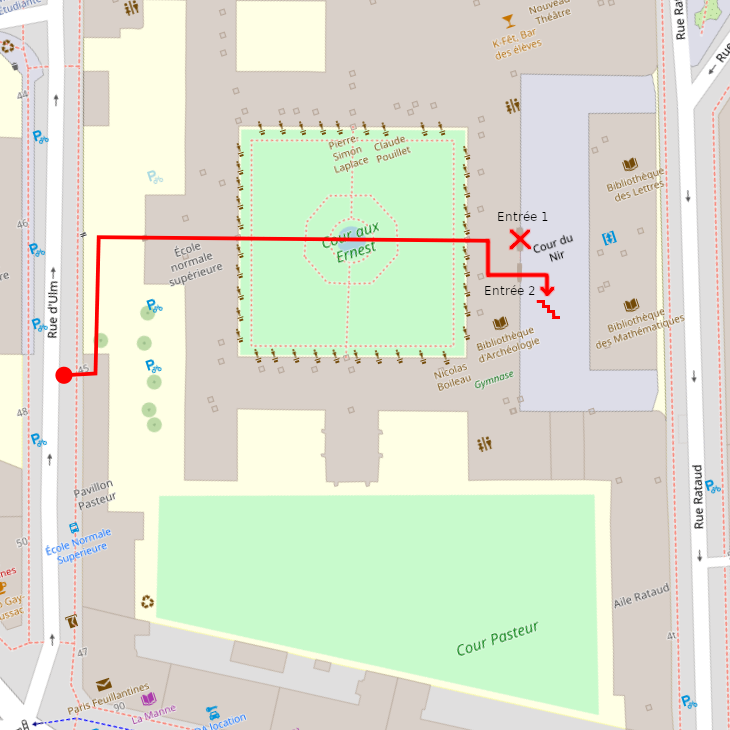
| 11/12/25 | Inria Paris | Final poster session | All | - |
This first lecture is a general introduction of modeling robotic systems. We review basic notions of control theory to describe the evolution of dynamical systems and introduce standard robot dynamics concepts.
Evaluation for this class will be based on weekly homework (20%) and either a project or an article study (80%).
Six homework assignments will be handed out and started in tutorial (TP) sessions. Lecturers will help get everyone started during those sessions, then the tutorials can be finished as homework. Tutorials are due on the Wednesday (Paris time) preceding the next lecture. They can all be found in the robotics-mva-2024 repository on GiHub.
To return your solution:
File → Save and Export Notebook As... → HTMLBest 5 out of 6 assigments will be used for calculating the final score from the homework. Some assignments have bonus questions that don't affect the grade (/3) of the individual assignment, but increase an independent pool of bonus points. If at least one bonus point is scored by the end of the course, the final grade will be rounded up using the ceiling function.
Final evaluation consists in either a project or an artical study, carried out by pairs of students (i.e. groups of size 2):
In projects, you select a topic of interest. A base list of topics is proposed in the evaluation topics document: it ranges from well-known to cutting-edge research works. You can pick/adapt from this list, or come up with their own proposals (e.g. build their own robots for a custom task, and implement its perception and action using some of the methods studied during the course).
In article studies, you read and report on a research paper from the list in the evaluation topics document. We strongly encourage a dash of creativity: you should be critical of the works they read, try to reproduce them (e.g. in simulation) to identify shortcomings or limitations of the assumptions made in the paper, and try to propose some next steps to overcome those. Examples of next steps include extending a proof, implementing another feature, trying the solution in a different context, etc.
Deliverables are a small report and a poster, to be presented to teachers, researchers and PhD students at the final poster session. You will need to print your poster beforehand, e.g. in A1 or A0 format, and bring it on that day. We will provide tape and a space to hang them.
{kind=link}